基于车辆行驶换道仿真的二次规划控制分配算法
”control_allocation quadprog_ 二次分配 换道 车辆“ 的搜索结果
我们在实现神经网络的时候经常会看到tf.control_dependencies的使用,但是这个函数究竟是什么作用,我们应该在什么情况下使用呢?今天我们就来一探究竟。 理解 其实从字面上看,control_dependencies 是控制依赖...
[MSILoader] MSIFileName=GadgetWide Cloud Control Service.msi
control_file_record_keep_time及alter system命令参数之scope1、control_file_record_keep_time基于nocatalog的备份管理方式,是将RMAN的备份信息放在控制文件中,由于控制文件的大小不能无限增大,所以在控制文件...

声明: 翻译tensorflow官方文档并进行了总结 ...tf.control_dependencies是tensorflow中的一个flow顺序控制机制,作用有二:插入依赖(dependencies)和清空依赖(依赖是op或tensor)。常见的tf.con...
tensorflow中的control_flow_ops模块属于tensorflow.python.ops中的一个模块,从switch函数的名称上看就是一个开关函数。 函数:control_flow_ops.switch(data,pred,dtype=None,name=None) 功能:用来选择数据的...
ABB_Control_builder_M.pdf 介绍了关于ABB_Control_builder_M的详细说明,提供其它ABB产品的技术资料的下载。
本文出自【我是干勾鱼的博客】 Ingredient: Python:Python 3.6.6(Python Downloads) ...tf.control_dependencies()函数是用来控制计算流图的,也就是给图中的某些计算指定顺序。有的时候我们想要指定...
转自...//usb_control_msg是没有用到urb的在USB中简单进行发送和接收的一种机制,用于少量的数据通信 linux+v2.6.35/drivers/usb/core/message.c 104/** 105 * usb_control_msg - Buil
linux下写了一个程序,给一个Usb设备发送数据,用的libusb的 libusb_control_transfer函数,如下 r = libusb_control_transfer(handle, LIBUSB_REQUEST_TYPE_VENDOR | LIBUSB_ENDPOINT_OUT, 0x04, 0x07, 0, (unsigned ...


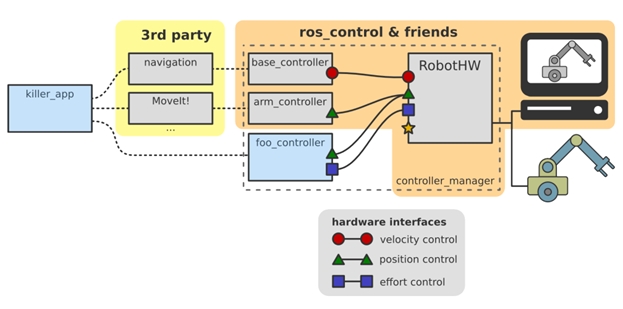
现场 rqt_graph 在一个陌生的框架下写代码,免不了有很多疑问与槽点。...不了解框架结构,千头万续,无从下手,说不清,理还乱。...ros_control是个什么东西? http://www.360doc.com/content/
tf.control_dependencies(control_inputs): control_dependencies(control_inputs) ARGS: control_inputs:在运行上下文中定义的操作之前必须执行或计算的 Operation 列表或 Tensor 对象.也可以是不清除控件...
Connection-Control插件用来控制客户端在登录操作连续失败一定次数后的响应的延迟。可防止客户端暴力破解。 一、查询插件是否安装 如果有connection_control则已安装,没有则继续下一步。 二、安装插件 在...
错误代码 ... _, ignore_mask = K.control_flow_ops.while_loop(lambda b,*args: b<m, loop_body, [0, ignore_mask]) AttributeError: module 'keras.backend' has no attribute 'control_flow_ops'
uav_control_node介绍
文章目录1. Controllers2.... gazebo_ros_control添加传动系统添加gazebo_ros_control插件默认gazebo_ros_control行为自定义gazebo_ros_control插件 1. Controllers sudo apt-get install ros-me

sudo apt-get install ros-indigo-control 进行查询,如下: robot@robot-ZBOX-EN1080-1080K:~/movo_ws$ sudo apt-get install ros-indigo-control ros-indigo-controller-interface ros-indigo-c...

全新的V2.2版本发布了,根据实际需要后面会完善基本功能,并开发出更实用的功能模块,欢迎小伙伴们留言。详细更新内容介绍如下: 更新1:新增移动机器人界面,新增加载模块功能,移动机器人需要先加载指定Rapid程序...
很久以前,我在开发一个TCP拥塞控制算法模块的时候,由于频繁快速迭代,常常需要将模块卸了再装,装了再卸,由于我更改的Linux的全局内核参数net.ipv4.tcp_congestion_control,我的ssh连接也是要使用同样的CC模块,...
我创建了一个ListControl,并将这个控件放在了一个对话框上面。具体的创建代码如下: m_meshlistctrl.Create(WS_CHILD|WS_BORDER|LVS_REPORT|LVS_SINGLESELC,Rect(1,1,300,400), this, IDC_LIST1); // IDC_LIST1是...
期待已久的V2.0基础功能版本发布了,根据实际需要后面会完善基本功能,并开发出更实用的功能模块,欢迎小伙伴们留言。详细更新内容介绍如下: 更新1:UI界面整体更新,整体风格选用蓝色主题界面边框显示 ...
错误表现: Freeze the first 249 layers of total 252 layers. Traceback (most recent call last): File "train.py", line 195, in <module> _main() File "train.py", line 38, in _main ...

在有些机器学习程序中我们想要指定某些操作执行的依赖关系,这时我们可以使用tf.control_dependencies()来实现。 control_dependencies(control_inputs)返回一个控制依赖的上下文管理器,使用with关键字可以让在这...
推荐文章
- 全开源即时通讯(IM)系统 高仿微信_wildfirechat-程序员宅基地
- 树和二叉树5——先序遍历输出叶子到根的逆路径_编写一个程序,采用先序遍历方法输出所有从叶子结点到根节点的逆路径,并对图a-程序员宅基地
- 网站快速成型工具-Element UI_基于element 的网页ui-程序员宅基地
- 巨页的配置和修改_hugepages_total-程序员宅基地
- 【python】Python报错:RecursionError: maximum recursion depth exceeded in comparison-程序员宅基地
- 完成SSH项目 -- 实现dao层_ssh框架service层调用dao有的能创建成功-程序员宅基地
- 在.net下将word文档转换为加有水印pdf文档_.net webapi word pdf添加水印 开源-程序员宅基地
- 解决openweather无法注册的问题_openweather api 创建账户被禁止了-程序员宅基地
- winscp通过跳板机访问远程服务器(使用秘钥的方式传输文件)_winscp 隧道 跳板机上的密码-程序员宅基地
- 从C++到Java(一)_enum c++ java-程序员宅基地